Marble Robotics: The Last-Mile Delivery Challenge
As interns with at SF-based Marble Robotics in 2016, my team was asked to create a streamlined aesthetic for the delivery robot as well as user interface.
All sketching, CAD, modeling, and rendering on this page is original and created by me.

Many projections view autonomous delivery modules completing the last mile of delivery after being transported the majority of the journey by larger vehicles or intermodal containers.
Role: Hardware Concept Design






The Inefficiencies of Modern Delivery

This chart shows the cost breakdown of the very inefficient last mile of delivery for a typical carrier. (American Resource Institute 2016)
Why the Last Mile?

Autonomous Grocery Delivery Robot: The Rough Skeleton Created in SolidWorks
The last mile of any shipment to an urban destination is always the least efficient part of the delivery system due to traffic, pedestrians, the high employee : package ratio.
Marble envisioned that costly last mile being performed by autonomous delivery modules.
Companion Concept: Combining Nature and Modernity
Inspired by the heeling dog's form and our natural inclination to trust its behavior. I abstracted shapes while considering functionality.
-
The Marble team aimed to blend nature's inspiration with emerging tech trends, focusing on Tesla designs.
-
Autonomous technology should symbolize loyalty, reliability, and, and I sought an aesthetic that fosters user connection and empathy.
![sc]ketch comp 3.jpg](https://static.wixstatic.com/media/95181f_7753b6bd0cfb4d16a03aa06f593e2699~mv2.jpg/v1/fill/w_637,h_478,al_c,q_80,usm_0.66_1.00_0.01,enc_avif,quality_auto/95181f_7753b6bd0cfb4d16a03aa06f593e2699~mv2.jpg)
Model Making to test door hinge designs






Using laser cutting, CNC, Hand sculpting and shop tools, this design prototype was built from low-cost materials such as foam-core board, wood dowels, and sculpting foam by the Intern Team.
The Navetta Experience

Storyboarding: As I contemplated the user’s interaction with the delivery robot, I sketched out interfacing scenarios to better understand its form.
One insight that arose was the idea for a compartmentalized cargo bay and its ability to “cargo pool” deliveries.
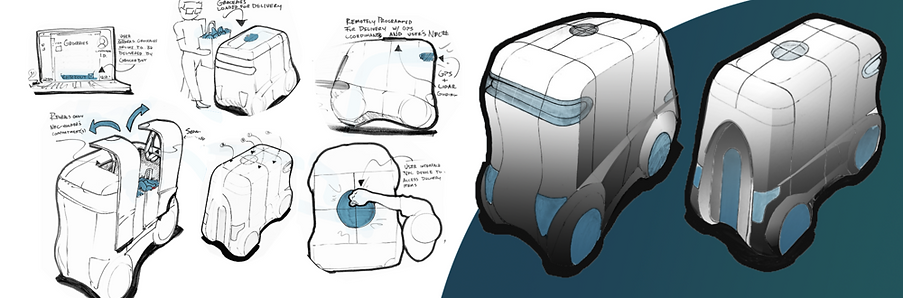
A final design sketch round accommodates front and rear LED lighting, lens guards for front and rear lidar/radar hardware as well as undercarriage terrain detection, and top-mounted RFID receiver for seamless end user interface. When considering the lidar housing, I integrated the forms into aesthetic elements rather than relegating the bulky hardware to afterthoughts imposed on the exterior. The result was a streamlined housing for components with direct elements taken from nature's insights and hardware trends. Rather than a digital touch interface, I proposed programmable RFID controlled compartments to allow access only to the cargo bay portion reserved for the user's items by touch-less interface. This would allow the 'robot' to visit multiple users before completing its trip.
.png)
Sam and Beth Get Deliveries
.png)

The autonomous Navetta arrives first to Sam where he accesses his compartments of the delivery via the NFC reader mounted on top and his smart device. He retrieves his delivery before closing the doors. and Navetta begins the next leg of its trip.

One delivery down, one delivery to go. Using a combination of GPS, Radar, and Lidar, the Navetta module safely and efficiently navigates the the area and lets the next addressee that their package will arrive soon.

One delivery down, one delivery to go. Using a combination of GPS, Radar, and Lidar, the Navetta module safely and efficiently navigates the the area and lets the next addressee that their package will arrive soon.
The Navetta V 1.0


"Navetta" translates from Italian as Shuttle. This is a nod to both its functionality as a conveyance and forward-looking applications.
The Curbs?
NBD.
A third pair of wheels extend to provide lift and stability while going up steps and uneven terrain.



The Hardware?
Streamlined.
Designed to create discreet feel while subtly displaying the high tech navigation technology under the protection of polished accents.






The Doors?
Whoosh.
Designed to take up as little space as possible on a crowded sidewalk by opening almost flush to the delivery module.
